
A neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion

A research article by scientists at the Nanjing University of Aeronautics and Astronautics developed a neural control algorithm to coordinate the adhesive toes and limbs of a climbing robot. The new research article, published in the journal Cyborg and Bionic Systems, provided a novel hybrid-driven climbing robot and introduced a neural control method based on CPG (Central Pattern Generator) for coordinating between adhesion and motion.
“Currently, the movement speed and stability of climbing robots have not yet reached the level of biological organisms. Animals have flexible climbing abilities on various slopes and roughness, as well as strong robustness against various disturbances,” explained corresponding author Zhouyi Wang, a professor at the Nanjing University of Aeronautics and Astronautics.
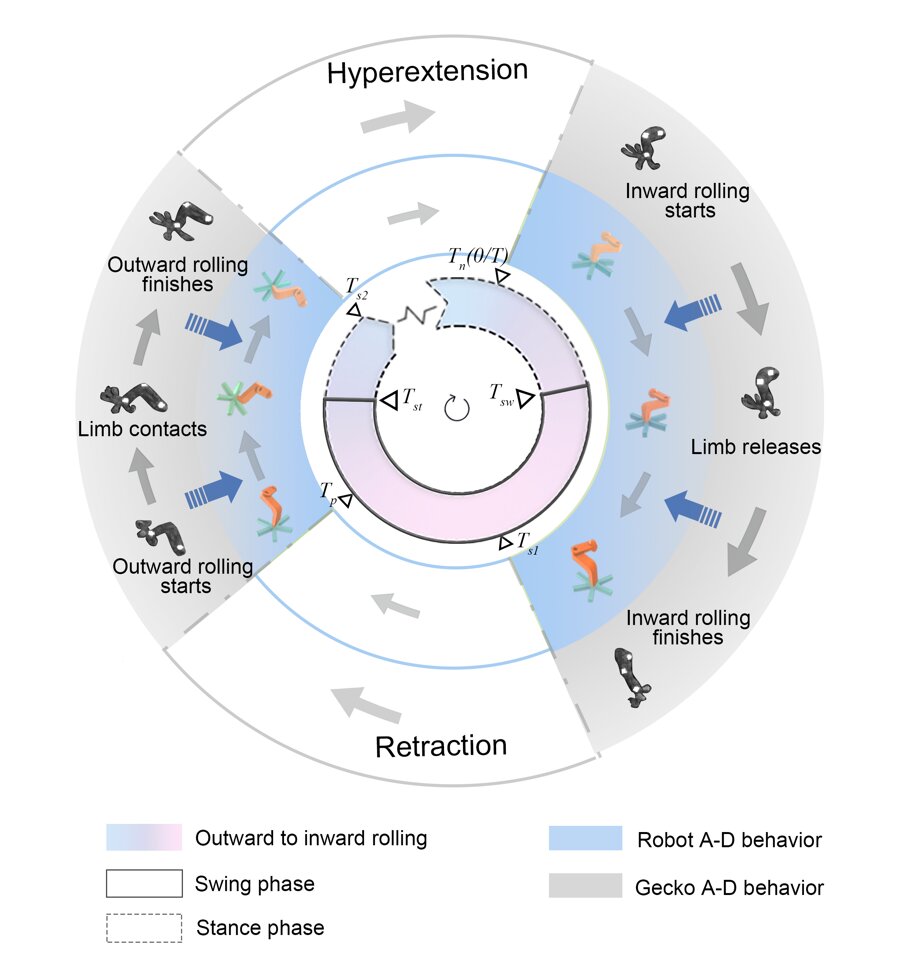
These excellent movement abilities originate from the functional collaboration in the motor skeletal–muscular system, the flexible attachment organs, fine-grained attachment structures, and fine-tuned regulation. The gecko’s autonomously inward-attached–outward-detached toes can generate substantially higher adhesion forces than those required for locomotion attachment.
“Combining existing pneumatic and electric driving technologies, we have developed a pneumatic-driven biomimetic flexible toe with active attachment-detachment for the adhesion feet of climbing robots, which has good surface adaptability but exhibits significant motion hysteresis. Coordinating the adhesion feet and motor-driven limbs to stabilize adhesion is the key challenge of motion control,” said the study authors. The pneumatic drive produces large deformation, while the motor drive produces great stiffness.
However, the nonlinear characteristics of pneumatic drive require special attention to motion coordination when combined with motor drive, especially in adhesion.
“Geckos are the teachers of our understanding of adhesive behavior. Through gecko kinematic experiments at different inclinations, we found a fixed phase difference between adhesive toes and limbs in rhythmic movement,” said Wang.
The article presents a modular neural control network that achieves coordination between adhesion and movement by stimulation-inhibiting modules and using different levels of inhibition for the movement timing of limbs and adhesive footpads. The experiment found that under coordinated neural control, the climbing angle and maximum movement speed of the climbing robot were significantly improved.
“By learning from gecko climbing behavior, we have further improved the performance of climbing robots. We believe that in the near future, robots will be able to walk on walls like geckos,” said Wang. The application of climbing robots currently faces technical challenges in materials, mechanics, control algorithms, and other areas. This research article provides researchers with a way to learn from nature and apply it to robot control from a biomimetic perspective.
More information:
Bingcheng Wang et al, A Neural Coordination Strategy for Attachment and Detachment of a Climbing Robot Inspired by Gecko Locomotion, Cyborg and Bionic Systems (2023). DOI: 10.34133/cbsystems.0008
Provided by
Beijing Institute of Technology Press Co., Ltd
Citation:
A neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion (2023, April 18)
retrieved 18 April 2023
from https://techxplore.com/news/2023-04-neural-strategy-detachment-climbing-robot.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.
Denial of responsibility! NewsBit.us is an automatic aggregator around the global media. All the content are available free on Internet. We have just arranged it in one platform for educational purpose only. In each content, the hyperlink to the primary source is specified. All trademarks belong to their rightful owners, all materials to their authors. If you are the owner of the content and do not want us to publish your materials on our website, please contact us by email – [email protected]. The content will be deleted within 24 hours.