



Roboticists worldwide have recently been developing a wide range of sophisticated robotic systems designed to operate and complete missions in different environments. Some of these systems were presented at conferences, events or competitions.
One of these competitions was the DARPA Subterranean (SubT) Challenge, which offered a US$3.5 million prize, funded by the Defense Advanced Research Projects Agency (DARPA), to robot prototypes that could navigate underground environments most effectively. The teams who participated included roboticists at leading educational instituitions, such as MIT, CMU, CalTech and KAIST, as well as renowned research facilities, such as NASA-JPL or CSIRO. The winning team, CERBERUS, included members from both academia and industry, working at NTNU, UNR, ETH Zurich, UC Berkley, Oxford and Flyability.
For the DARPA competition, the team at NTNU and ETH Zurich developed a marsupial robotic system that enabled collaborative exploration and mapping capabilities between a legged and aerial robot in a marsupial configuration. This system, introduced in a paper pre-published on arXiv and set to appear in a peer-reviewed journal, is designed to efficiently navigate and explore unknown underground environments.
“Our study builds upon a very close collaboration between our lab (ARL—Autonomous Robots Lab), now located at NTNU, Norway (and previously in Reno, Nevada), and our colleagues at ETH Zurich’s RSL—Robotic Systems Lab,” Paolo De Petris, one of the researchers who carried out the study, told TechXplore. “Our primary objective was to satisfy the promise we made, at the beginning of the competition, to deploy a flying robot from a walking one.”
During the DARPA competition, De Petris and his colleagues were unable to demonstrate the operation of a system based on the collaboration between a flying and a walking robot in real-time, due to issues associated with the COVID-19 pandemic and restricted travel. Nonetheless, they continued to work on their system and experimentally tested it in a set of real-world environments.
“Our idea comes from a very simple concept: the complementarity of walking and flying robots,” De Petris explained. “We believe that in underground, perceptually degraded environments, the collaboration between a walking robot like ANYmal, which has awesome long operation time, high payload capability, communication to a ground station extension capability etc. but limited to ground operations, and a flying robot like RMF-Owl, results overall in a very efficient and logic exploration mission.”
The team envisioned their system being deployed is to complete missions in unknown underground environments. In this scenario, the ANYmal legged robot would be sent to the unknown environment with the RMF-Owl flying robot on its back.
While navigating the environment, the ANYmal robot can create a map of the unknown space. As it does this, however, it could also identify potential regions in its surroundings where the RMF-Owl flying robot could be deployed,
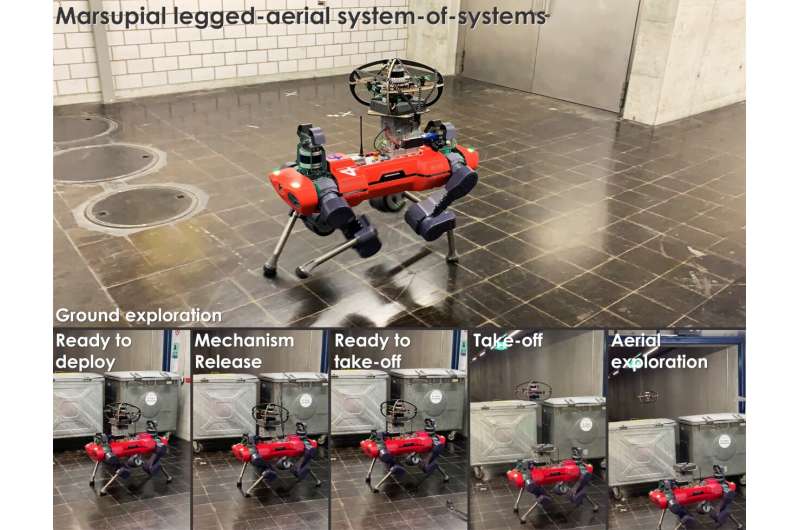
“These regions could be too high for ANYmal to reach or obstructed due to a collapsed section of a tunnel, and so on,” De Petris said. “When ANYmal decides that there is no more space that he can explore, or simply by an operator command, if communication allows, it will place itself at the border of one of these identified regions, send the up-to-date map to RMF-Owl, and command the flying robot to explore the new section, updating and expanding the shared map.”
Ultimately, as the team envisioned their system, the RMF-Owl robot could explore regions that are inaccessible to the legged ANYmal robot. Once it finished its exploration sub-task, it would return to the point where it took off and land safely on the ground.
So far, the team merely developed a prototype of their system. In the future, however, they plan to develop it further to include more features, particularly enhancing its marsupial deployment function.
“Eventually, RMF-Owl should of course land on the back of ANYmal, have a recharging system to fill-up the battery while not flying, and many more awesome engineering peculiarities that we did not have time to implement,” De Petris said.
So far, the team evaluated their system in a series of tests and found that it achieved remarkable results. Specifically, they observed a good collaboration between the walking and flying robots, which enabled a broader exploration of unknown environments.
In the future, their system could be implemented in a series of real-world environments. For instance, it could be deployed inside collapsed mines, sites with narrow passages, caves and even in big industrial facilities with complex inspection requirements. In all these scenarios, the team’s system could enable a more precise and thorough exploration or inspection.
“I am personally interested in collision-tolerant flying robots, as you might have noticed from RMF-Owl, but the question is: now that we can accept some collisions, how can we augment the autonomous exploration with this capability?” De Petris added. “One very interesting problem is related to path planning: traditional path planning algorithms will never find a path in a small gap if the robot does not fit nicely.”
In a subsequent paper set to be published soon, De Petris and his colleagues explored strategies to augment their system’s collision-tolerant exploration capabilities. As the RMF-Owl robot is partly resistant to collisions, their robotic system could still manage to complete missions even if the robot partly collides with some objects.
“Another personal goal I have is to go small scale: a lot of people are still scared when they see these giant carbon fiber 15-inch blades flapping around,” De Petris added. “From a research point of view, big drones do not fit in tiny spaces. For example, we have an ongoing project for ballast-tank inspection and the manholes there are 0.6×0.4m (RMF-Owl barely fits).”
Paolo De Petris et al, Marsupial walking-and-flying robotic deployment for collaborative exploration of unknown environments. arXiv:2205.05477v1 [cs.RO], arxiv.org/abs/2205.05477
© 2022 Science X Network
Citation:
A marsupial robotic system that combines a legged and an aerial robot (2022, June 1)
retrieved 1 June 2022
from https://techxplore.com/news/2022-06-marsupial-robotic-combines-legged-aerial.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
For all the latest Technology News Click Here
For the latest news and updates, follow us on Google News.